RPMsg 포팅
소개
멀티코어 환경에서 가볍고 효율적인 프로세서 간 통신(IPC)을 구현하기 위해 사용되는
표준 프로토콜이 바로 RPMsg(Remote Processor Messaging) 입니다.
주로 Linux + MCU(또는 RTOS) 구조에서 널리 활용되며, 임베디드 시스템의 이종 프로세서 간 메시지 교환을
단순하고 안정적으로 만들어 줍니다.
RPMsg 기본 구조
RPMsg는 OpenAMP 프레임워크 위에서 동작합니다.
구성요소는 다음과 같습니다.
virtio
가상의 장치를 추상화 하는 인터페이스 입니다.
Vring
실제 데이터 버퍼의 링 구조 큐
송/수신 메세지를 큐 기반으로 관리 합니다.
Remoteproc
Remote device를 로드/부팅/관리 하는 기능
크게 start, stop, kick 3가지 기능이 있으며, start/stop은 Remote device 제어,
kick은 통신을 하기 위한 doorbell(notify)역할을 한다.
각 벤더마다의 시나리오를 구축할 수 있도록 플랫폼 드라이버가 필요하다.
Master 쪽에서 핵심적으로 구현이 필요한 부분입니다.
RPMsg endpoint
실제 메세지를 주고 받는 채널 입니다.
Linux와 RTOS 각각에서 동일한 이름을 가진 endpoint 끼리 연결됩니다.
RPMsg 포팅 이유
멀티코어 간 IPC 직접 구현할 필요 없이 표준 API를 제공합니다.
공유 메모리 기반 구조로 빠른 전송이 가능합니다.
Linux/Zephyr등 주요 OS를 지원합니다.
Porting Note
포팅 시나리오는 두 클러스터 간 rpmsg를 활용한 통신입니다.
RPMsg에서는 Master와 Remote 장치로 나누어 지는데 보통 Master device에는 Linux,
Remote device는 Zephyr같은 RTOS가 돌아가는 환경이 주가 됩니다.
먼저, master를 위한 driver를 개발하고, remote는 zephyr 환경에서 운용하도록 하겠습니다.
chip: tcc807x
linux: 5.10 (Sub-Core, RPMsg master)
zephyr: 3.7 (Main Core, RPMsg remote)
1차 시나리오는 remoteproc 드라이버에서 start/stop을 제외하고,
kick만 구현하여 doorbell interrupt만 지원합니다.
우선, 제대로 동작이 되는지 확인하는 단계가 되겠습니다.
따라서, Remote device의 self-boot 상황을 가정하고, carveouts를 static 하게 제공합니다.
virtio 기반으로 shared memory를 쓰기 때문에, dcache coherency를 반드시 보장해야 합니다.
(cache invalidate / cache flush)
시나리오상, resource_table 은 remote 최종 형상으로부터 결정되기 때문에,
remote부터 작업합니다.
Remote: zephyr examples
zephyr 같은 경우에는 기본적으로 openamp library가 제공되어 있고,
sample이 완성되어 있습니다.
openamp_rsc_table 예제로, linux kernel과 통신예제를 확인할 수 있습니다.
cache coherency
그 이전에, zephyr에서도 cache coherency를 보장해줘야 합니다.
다음 2가지 config가 활성화 되어 있어야 합니다.
CONFIG_CACHE_MANAGEMENT=y
CONFIG_OPENAMP_WITH_DCACHE=y
반영 여부는 west build 후, build/zephyr/.config 에서 확인할 수 있습니다.
위 config들이 반영되어 있어야 zephyr는 cache invalidate / flush 를 제대로 수행합니다.
self-boot 시나리오
기본적으로, auto-boot기준으로 드라이버가 개발되어 있기 때문에 self-boot에 맞게
일부 수정해 주어야 합니다.
특히 library도 수정해주어야 하기 때문에 저같은 경우에는 sample을 따로 분리해서 개발했습니다.
lib/open-amp/resource_table.h 파일에 다음 부분을 수정해 주어야 합니다.
(참고) 저같은 경우, lib 아래 파일을 수정하는 것이 껄끄러워서, sample을 따로 분리해서 작업했습니다.
boards/telechips/tcc807x/tcc8070_lpd4x322.dts | 7 +
dts/arm64/telechips/tcc807x-rproc.dtsi | 12 +
samples/subsys/ipc/tcc_rsc_table/CMakeLists.txt | 13 +
samples/subsys/ipc/tcc_rsc_table/README.rst | 127 ++++++++++
samples/subsys/ipc/tcc_rsc_table/boards/tcc8070_lpd4x322.conf | 2 +
samples/subsys/ipc/tcc_rsc_table/boards/tcc8070_lpd4x322.overlay | 25 ++
samples/subsys/ipc/tcc_rsc_table/prj.conf | 13 +
samples/subsys/ipc/tcc_rsc_table/sample.yaml | 6 +
samples/subsys/ipc/tcc_rsc_table/src/main_remote.c | 405 +++++++++++++++++++++++++++++++
samples/subsys/ipc/tcc_rsc_table/src/resource_table.h | 84 +++++++
soc/telechips/tcc807x/mmu_regions.c | 11 +-
일단 수정 내용을 살펴보면,
...
#define VRING_RX_ADDRESS -1 /* allocated by Master processor */
#define VRING_TX_ADDRESS -1 /* allocated by Master processor */
#define VRING_BUFF_ADDRESS -1 /* allocated by Master processor */
이 부분을 static한 주소할당이 유용하도록 제공해야 합니다.
#define VRING_RX_ADDRESS 0x200c9000UL /* reserved address (self-boot) */
#define VRING_TX_ADDRESS 0x200c8000UL /* reserved address (self-boot) */
#define VRING_BUFF_ADDRESS 0x200ca000UL /* reserved address (self-boot) */
section: resource_table
zephyr 빌드 후, resource_table 영역은 다음 명령어로 확인할 수 있습니다.
$ nm build/zephyr/zephyr_tcc_rsc_table.elf | grep resource_table
00000000200c63b8 d resource_table
carveout 주소들이 어떻게 정해졌냐면,
메모리 영역을 잡는데 가장 중요한 것은 resource_table 이며, 사실 carveout들은 이처럼
resource table과 가까이 붙어 있을 필요는 없습니다.
처음에는 임의의 주소를 정해 놓고 나서 빌드 후, 0x200c63b8이라는 주소를 얻게 되었고,
나중에 carveouts 주소를 0x200c8000–0x200ce0000 만큼 할당한 것입니다.
zephyr mmu region
zephyr는 mmu region을 추가해 주어야 합니다.
각 벤더에 정의된 mmu_region을 추가합니다.
...
arm_mmu_region mmu_regions[] = {
...
MMU_REGION_FLAT_ENTRY("VRING0", 0x200c8000, 0x1000,
MT_NORMAL | MT_P_RW_U_NA | MT_DEFAULT_SECURE_STATE),
MMU_REGION_FLAT_ENTRY("VRING1", 0x200c9000, 0x1000,
MT_NORMAL | MT_P_RW_U_NA | MT_DEFAULT_SECURE_STATE),
MMU_REGION_FLAT_ENTRY("VDEV0BUFFER", 0x200ca000, 0x4000,
MT_NORMAL | MT_P_RW_U_NA | MT_DEFAULT_SECURE_STATE),
...
};
...
zephyr가 모르는 영역에 접근하게 되면 panic이 발생하기 때문입니다.
device tree는 다음과 같이 구성하였습니다.
dtsi
/*
* Copyright (C) 2024 Telechips Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
&{/} {
chosen {
zephyr,ipc = &a55mp_a55sp_mbox;
zephyr,ipc_shm = &vdev0buffer;
};
};
dts
...
reserved_memory: reserved-memory {
#address-cells = <2>;
#size-cells = <2>;
ranges;
};
...
overlay
/*
* Copyright (C) 2025 Telechips Inc.
*
* SPDX-License-Identifier: Apache-2.0
*/
&reserved_memory {
vdev0vring0: vdev0vring0@200c8000 {
compatible = "zephyr,memory-region", "shared-dma-pool";
reg = <0x0 0x200c8000 0x0 0x1000>;
zephyr,memory-region = "VRING0";
};
vdev0vring1: vdev0vring1@200c9000 {
compatible = "zephyr,memory-region", "shared-dma-pool";
reg = <0x0 0x200c9000 0x0 0x1000>;
zephyr,memory-region = "VRING1";
};
vdev0buffer: vdev0buffer@200ca000 {
compatible = "zephyr,memory-region", "shared-dma-pool";
reg = <0x0 0x200ca000 0x0 0x4000>;
zephyr,memory-region = "VDEV0BUFFER";
};
};
Master: Linux driver
리눅스에는 기본적으로 rpmsg 프레임워크를 제공합니다.
$ ls drivers/rpmsg
Makefile mtk_rpmsg.c rpmsg_char.c rpmsg_core.c
Kconfig virtio_rpmsg_bus.c rpmsg_internal.h
리눅스에는 기본적으로 remoteproc 프레임워크도 제공합니다.
$ ls drivers/remoteproc
Kconfig mtk_common.h mtk_scp.c mtk_scp_ipi.c
Makefile omap_remoteproc.c omap_remoteproc.h
remoteproc_cdev.c remoteproc_core.c remoteproc_coredump.c
remoteproc_debugfs.c remoteproc_elf_helpers.h remoteproc_elf_loader.c
remoteproc_internal.h remoteproc_sysfs.c remoteproc_virtio.c
기본적으로 Remote device auto-boot 시나리오 기준으로 맞추어진 프레임 워크입니다.
tcc807x 칩을 기준으로, remote device는 master device가 부팅하기 이전에 부팅이 되어 있을 경우가
대부분이고, remote device의 생명주기를 관리할 예정이 없기 때문에, self-boot 기준으로
remoteproc platform driver를 개발합니다.
self-boot 시나리오
RPMsg 전체 시나리오는 다음과 같습니다.
1. 커널 부팅 시, Device Tree에 명시된 "telechips,tcc807x-rproc" compatible 문자열과 일치하는<br>
tcc_rproc_driver의 probe 함수가 호출됩니다.
2. rproc_alloc(): 원격 프로세서(remote processor)를 표현하는 struct rproc 객체를 생성합니다.
이 객체는 원격 프로세서의 라이프사이클을 관리하는 핸들입니다. self-boot 이므로, kick 만 구현합니다.
Device Tree의 memory-region 속성을 읽어 리소스 테이블(rsc-table)을 포함한 공유 메모리 영역을 memremap으로 매핑합니다.
이 단계에서 priv->rsc_table에 리소스 테이블의 가상 주소가 저장됩니다.
그리고 rproc_add_carveout()를 호출하여 사전에 carveouts가 있음을 virtio_rpmsg 프레임 워크에 알려야 합니다.
3. rproc_boot() 함수는 self-boot 구현이므로 호출 되기 전, rproc->state가 RPROC_DETACHED 상태여야 하고,
auto-boot 옵션을 꺼서 펌웨어를 로드하는 대신 rproc_actuate() 함수를 호출합니다.
4. 리소스 테이블에서 type이 RSC_VDEV인 항목을 발견하면, rproc_handle_vdev() 함수가 호출됩니다.
이 항목이 바로 virtio 장치를 정의합니다.
(추가) 만약, 2번 과정에서 rproc_add_carveout()을 호출하지 않았다면,
이 과정에서 커널은 dma_alloc_coherent로 carveouts 주소를 할당합니다. (dynamic allocation)
5. rproc_actuate()는 리소스 처리가 끝나면 rproc_start_subdevices()를 호출합니다.
rproc_start_subdevices() -> rproc_vdev_do_start(): RSC_VDEV 리소스를 통해 생성된
각 rproc_vdev의 start 함수를 호출합니다.
6. rproc_vdev_do_start() -> rproc_add_virtio_dev(): rproc_vdev 정보를 바탕으로
struct virtio_device를 생성하고 virtio 버스에 등록합니다.
virtio_device가 등록되면, virtio 버스는 이 장치와 매칭되는 드라이버를 찾습니다.
7. virtio_rpmsg_bus 드라이버는 VIRTIO_ID_RPMSG ID를 가지고 있으므로,
이 드라이버의 probe 함수인 rpmsg_probe()가 호출됩니다.
8. virtio_find_vqs(): virtio_device로부터 virtqueue를 찾아 초기화합니다.
이 virtqueue는 2단계에서 할당된 vring 메모리를 기반으로 동작합니다.
rx와 tx 두 개의 virtqueue를 찾습니다.
9. 버퍼 할당: dma_alloc_coherent()를 다시 호출하여 메시지 페이로드(payload)를 담을 실제 통신 버퍼들(rbufs, sbufs)을 할당합니다.
(vring 메모리와는 별개의 공간입니다.)
버퍼 등록: virtqueue_add_inbuf()를 루프 안에서 호출하여 할당된 수신(rx) 버퍼들을 rvq(receive virtqueue)에 등록합니다.
이제 원격 프로세서는 이 버퍼들에 메시지를 쓸 수 있습니다.
virtio 장치가 통신할 준비가 되었음을 알립니다. (rsc table에 status update)
10. virtqueue_notify(): rvq에 버퍼가 준비되었음을 원격 프로세서에 kick을 보냅니다.
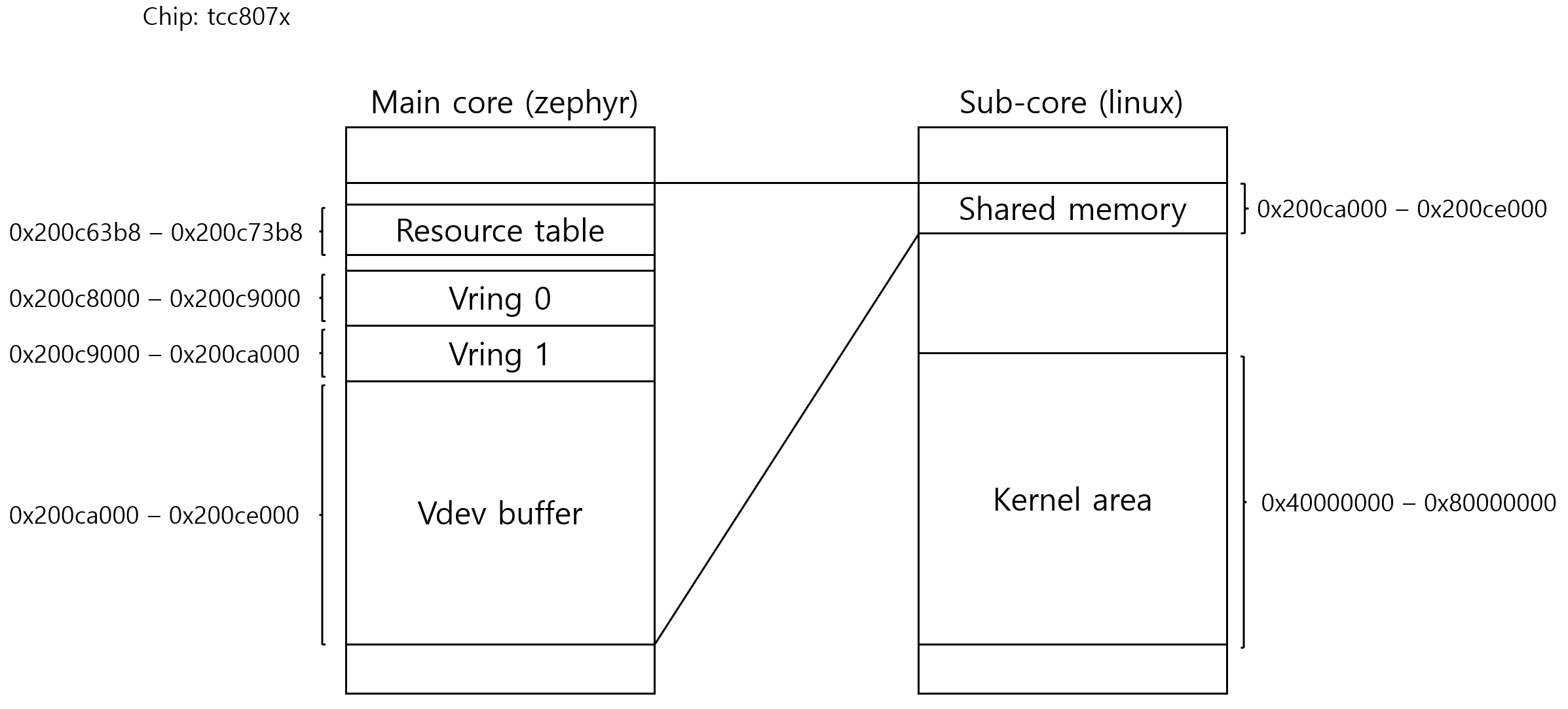
shared memory map 구성
shared memory 구성은 remote device의 resource table 로부터
크게 떨어지지 않게 구성하였습니다.
resource table의 경우, self-boot 시나리오 상, master에서 관여할 수가 없기 때문에,
remote의 최종 형상에 따라 결정됩니다.
device tree는 다음과 같이 구성하였습니다.
// SPDX-License-Identifier: (GPL-2.0-or-later OR MIT)
/*
* Copyright (C) 2025 Telechips Inc.
*/
#include "tcc807x-subcore-mbox.dtsi"
/ {
/* Sub-Core(Master) <-> Main Core(Remote) */
rpmsg_shm: shm@200c6000 {
device_type = "memory";
reg = <0x0 0x200c6000 0x0 0x8000>;
status = "disabled";
};
tcc-rproc {
compatible = "telechips,tcc807x-subcore-rproc";
mboxes = <&a55sp_a55mp_mbox 0>;
memory-region = <&rsc_table0>,
<&vdev0vring0>,
<&vdev0vring1>,
<&vdev0buffer>;
status = "disabled";
};
};
&reserved_memory {
rsc_table0: rsc-table@200c6000 {
no-map;
/* Required rsc table size is 4K*/
/*allocate an extra 4K margin for offset handling. */
reg = <0x0 0x200c6000 0x0 0x2000>;
tcc,rsc-offset = <0x3b8>;
tcc,rsc-size = <0x1000>;
status = "disabled";
};
vdev0vring0: vdev0vring0@200c8000 {
no-map;
reg = <0x0 0x200c8000 0x0 0x1000>;
status = "disabled";
};
vdev0vring1: vdev0vring1@200c9000 {
no-map;
reg = <0x0 0x200c9000 0x0 0x1000>;
status = "disabled";
};
vdev0buffer: vdev0buffer@200ca000 {
no-map;
reg = <0x0 0x200ca000 0x0 0x4000>;
status = "disabled";
};
};
정리
porting 후, linux kernel에서 제공하는 rpmsg-client-samples를 실행했습니다.
메세지는 100회에서 3회로 수정하였습니다. (100회는 zephyr가 속도를 따라가지 못해 대부분의 메세지를 drop합니다.)

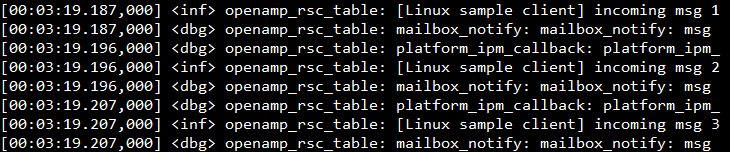
ipc를 rpmsg를 포팅하여 시도해 본것은 처음인데, 잘 되었습니다.
rpmsg/virtio 스터디, 타 업무 진행 포함 포팅하는데 3주 정도 소요 된 것 같습니다.
zephyr 빌드의 경우 주제가 달라 따로 포스팅 하지 않았습니다.
Leave a comment